



На складі існують різні типи полиць для зберігання, а методи зберігання та вилучення в основному поділяються на такі категорії, включаючи ручне зберігання та вилучення, зберігання та вилучення навантажувачами та автоматичне зберігання та вилучення. Сьогодні багато підприємств хочуть реалізувати автоматизовану роботу складу, тому вони хочуть використовувати автоматизовані складські стелажі. Наприклад, чотиристоронній стелаж для автомобіля є різновидом автоматизованого стелажа для зберігання. Як чотиристоронній човник AGV в'їжджає та виїжджає зі складу? Проаналізовано складське підприємство з виробництва важких полиць Haigris.

Чотиристоронній склад
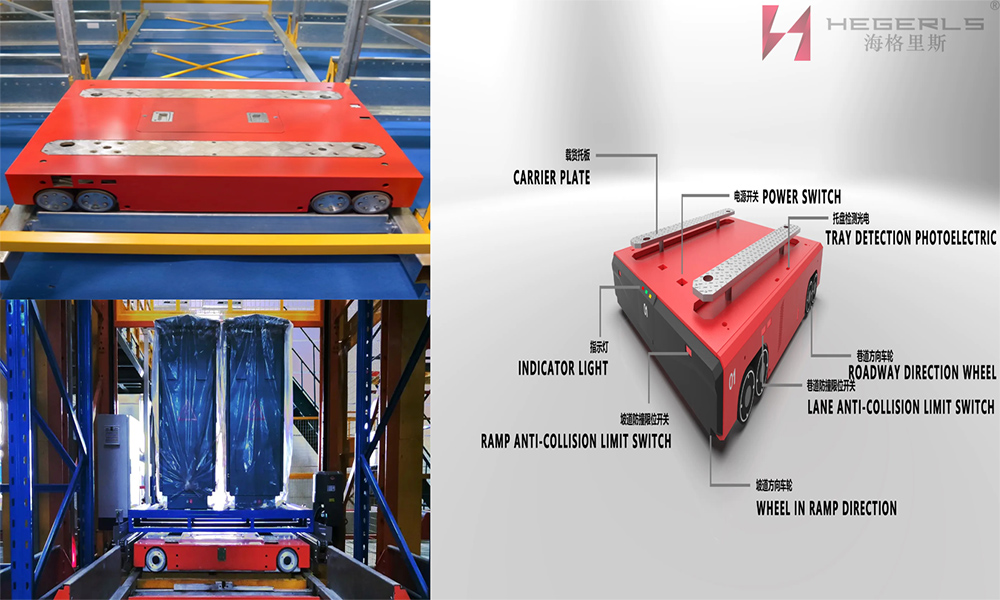
Човник оснащений 12 колесами, які можуть рухатися в чотирьох напрямках по площині гусениці і вільно діставатися до будь-якого вантажного приміщення на площині складу. Човник з чотирма напрямками приводиться в рух колесами з обох сторін одночасно, щоб кузов автомобіля не прогинався під час роботи, і він може бігати по черзі по поздовжніх і поперечних рейках на тривимірній полиці.

У той же час чотиристоронній човник є інтелектуальним пристроєм для керування, який може рухатися не лише вздовж, але й убік. Човник має високу гнучкість, може за бажанням змінювати робочу проїжджу частину та регулювати пропускну здатність системи, збільшуючи або зменшуючи кількість вагонів човника. Якщо необхідно, на пікове значення системи можна реагувати, встановлюючи режим планування робочої команди транспортного засобу, вирішуючи вузькі місця операцій входу та виходу, а також можуть бути замінені один одним, коли маршрутка або ліфт виходять з ладу, інші шатли або ліфти можуть бути відправлені через систему диспетчеризації, щоб продовжити виконання операції без впливу на пропускну здатність системи. Цей пристрій підходить для зберігання як з низьким потоком, так і з високою щільністю, а також для зберігання з високим потоком і високою щільністю. Це може досягти більшої ефективності, витрат і ресурсів.
Як чотиристоронній човник AGV в'їжджає та виїжджає зі складу?

1) Складський спосіб
a) Техніки інтелектуального чотиристороннього шатла спочатку вмикають інтелектуальний чотиристоронній шатл і готують його. Розумний чотиристоронній трансфер знаходиться в режимі очікування;
b) Після підтвердження місця вибору інтелектуального чотиристороннього шатла WCS спланує маршрут руху відповідно до поточного місцезнаходження та місця призначення інтелектуального чотиристороннього шатла, а потім персонал розподілить товари до інтелектуального чотиристороннього шатла трансфер через WCS;
c) Розумний чотиристоронній човник починає виконувати завдання доставки відповідно до отриманої команди завдання;
d) На перехресній доріжці інтелектуальний чотиристоронній човник проїжджає фактичну відстань у режимі переміщення. Під час руху він постійно сканує сліди, по яких проходить нижня частина кузова автомобіля. Кожне місце перетину, яке він проходить, оцінює та калібрує відстань, яку він проходить, скануючи сліди. Коли він наближається до пункту призначення, він точно налаштовує позицію паркування за допомогою бічного лазерного датчика для досягнення точного позиціонування позиції паркування;
e) У допоміжному каналі інтелектуальний чотиристоронній шаттл може сканувати поперечну доріжку та відбивач бокового калібрувального дзеркала, оцінювати та перевіряти відстань, скануючи положення точки, і досягати точного контролю позиціонування у допоміжному каналі для досягнення пункту призначення;
f) Коли інтелектуальний чотиристоронній човник прибуває до вибраної позиції комплектування, піддон опускається, товар розміщується на полиці, а система WCS повідомляється про завершення завдання доставки;
g) Інтелектуальний чотиристоронній човник продовжує отримувати інструкції щодо завдання або повертається до зони очікування.
2) Спосіб доставки
a) Техніки інтелектуального чотиристороннього шатла спочатку вмикають інтелектуальний чотиристоронній шатл і готують його. Розумний чотиристоронній трансфер знаходиться в режимі очікування;
b) Після підтвердження місця підбору інтелектуального чотиристороннього шатла WCS спланує маршрут руху відповідно до поточного місцезнаходження та місця призначення інтелектуального чотиристороннього шатла, а потім персонал надішле завдання на підбір інтелектуального чотирьох - маршрутний трансфер через WCS;
c) Розумний чотиристоронній човник починає підбирати товари відповідно до отриманої команди завдання;
d) На перехресній доріжці інтелектуальний чотиристоронній човник рухається в режимі переміщення через фактичну відстань. Під час руху він постійно сканує сліди, по яких проходить нижня частина кузова автомобіля. Кожне місце перетину, яке він проходить, оцінює та перевіряє відстань, яку він проходить, скануючи сліди. Під час наближення до місця призначення він точно налаштовує позицію паркування за допомогою бічного лазерного датчика для досягнення точного контролю позиціонування та паркування;
e) У допоміжному каналі інтелектуальний чотиристоронній транспортний засіб сканує поперечну колію та відбивач бокового калібрувального дзеркала, оцінює та калібрує відстань, скануючи ці точки, і здійснює контроль точного позиціонування у допоміжному каналі для досягнення пункту призначення. .
Час публікації: 19 вересня 2022 р